Le mobile sur coussin d’air est parfait pour étudier les mouvements d’un objet. Mais, même la dernière génération à jet d’encre coute cher. Au collège, il est donc difficile d’en acquérir.
Je propose ici une modeste alternative bien moins cher. Elle fonctionne correctement pour permettre des mesures fiables. Le montage est toutefois à ajuster régulièrement.
Je l’ai proposé à mes élèves. Ils ont tout de suite compris le système de pointage.
Á quoi ça sert ?
- Á étudier les différents types de mouvements.
- Á tracer une trajectoire.
- Á calculer une vitesse moyenne.
- Á calculer une vitesse instantanée.
- Á lire un programme (Scratch).
- Á programmer (Scratch) .
- …
Matériels nécessaires
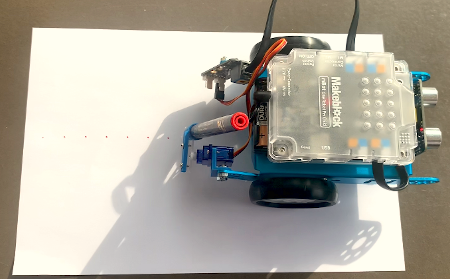
- Un robot Mbot (ou autre). Certains collèges ont été dotés de plusieurs de ces robots pour la technologie.
- Un module adaptateur pour commander le servomoteur afin d’incliner un feutre.
- Un petit servomoteur.
- Un feutre. Peu importe la couleur 😉
- 4 boulons 4mm. (fourni avec le robot)
Supports (servomoteur et stylo) à imprimer en 3D En bleu clair sur l’image.

Réglages et précautions
- Utiliser une table bien plate. Les paillasses doivent l’être, non ? 😉
- Il faudra peut être scotcher la feuille car parfois elle est entrainée par le feutre.
- Le support pour le feutre est adapté au mien. Il faudra en créer un pour d’autres feutres. Le professeur de technologie peut vous aider dans cette tâche.
- Le feutre ne doit pas trop toucher la feuille pour ne pas freiner le robot voire l’arrêter si la vitesse est faible. C’est ce réglage qui est délicat mais n’est pas fastidieux.
- Attention à l ‘orientation du servomoteur : pignon vers le bas.
La programmation
Avant tout, il faut télécharger le logiciel afin d’utiliser le Mbot et effectuer les bons réglages : cliquer ici
Voici une partie du programme nécessaire pour faire les pointages réguliers :
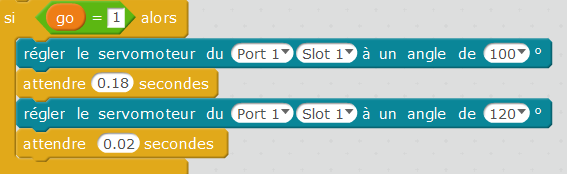
Le programme complet comporte plusieurs mouvements selon la touche de la télécommande. Je vous invite à télécharger le programme et à repérer le type de mouvement selon la touche choisie.
Télécharger mon programme.
Il manque le mouvement circulaire mais j’y travaille ;-). Vous pouvez aussi m’envoyer vos créations pour les partager ici.
Combien ça coute ?
- Un robot. Par exemple le Mbot : environ 90 euros
- Un module adaptateur : environ 4 euros.
- Un servomoteur : environ 6 euros.
- Quelques centimes d’euros pour l’impression 3D des supports.
Si en technologie les robots sont présents, le coût est environ de 10 euros. Quasiment rien comparé aux mobiles auto-portés !
Exploitations possibles avec les élèves
Il suffit de montrer le robot pour aiguiser leur attention !
Avec les 3e, j’ai fait mon cours comme ceci :
- Présentation du robot.
- Présentation du fonctionnement du servomoteur.
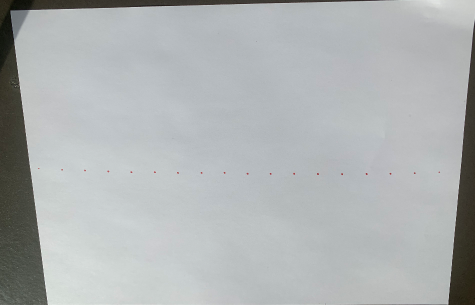
- Je mets le robot en fonctionnement et il pointe sa position au cours du temps.
- J’ai donnée une photocopie du document obtenu. (préparé à l’avance)
- J’ai donné un document présentant une partie du code de programmation :
- Les élèves devaient : a) Tracer la trajectoire b) Calculer la vitesse moyenne.
Bilan : aucune question sur l’obtention du premier document, en revanche la partie programmation est plus difficile à interpréter. Manque de pratique informatique ?